在当今互联网高度发达的时代,大多数游戏都需要依赖网络连接才能正常运行,但仍有不少玩家偏爱无需网络的单机游戏,其中单机斗地主凭借其便捷性和趣味性成为大众首选,单机斗地主无需网络版下载是指通过本地安装游戏客户端,无需联网即可畅玩的游戏形式,它不...

密云水库作为北京重要的水源保护地,其生态环境和水质安全直接关系到首都的可持续发展,近年来,随着无人机技术的普及,一些未经批准的飞行活动对水库管理带来了新的挑战,因此实施严格的禁飞政策成为保障水库安全的必要措施,密云水库的禁飞规定并非限制科技...

彩虹4无人机作为中国自主研发的中高空长航时察打一体无人机系统,其飞行高度设计体现了现代无人作战平台的技术特点,既满足了军事侦察、打击任务的需求,又兼顾了复杂环境下的适应能力,从技术参数来看,彩虹4无人机的实用升限通常在7000至8000米之...

中国无人机研究现状分析近年来,随着技术的快速发展和应用场景的不断拓展,中国无人机产业呈现出蓬勃发展的态势,已成为全球无人机领域的重要参与者和引领者,从技术研发、产业链构建到市场应用,中国无人机行业在多个维度取得了显著进展,同时也面临着一些挑...

华为Mate7作为一款里程碑式的智能手机,其在2014年发布时凭借独特的商务定位和金属机身设计赢得了市场关注,而华硕ROG(RepublicofGamers)系列则以极致的游戏性能和电竞基因闻名,将两者的技术特性进行对比分析,可以洞察智...
当电脑显示网络连接成功但无法上网时,这通常意味着设备已与路由器或调制解调器建立物理连接,但数据无法正常传输至互联网,这种问题可能涉及多个层面,包括网络配置、DNS设置、防火墙限制或运营商服务故障等,以下是详细的排查步骤和解决方案,帮助用户快...

Aopa植保无人机考题主要围绕理论知识、实操技能和安全规范展开,旨在全面考核从业人员的专业素养,理论知识部分通常包括无人机系统原理、气象知识、法律法规及植保基础,无人机动力系统中的电机类型、电池特性、飞控系统逻辑等是高频考点,考生需理解不同...
2007年是信息技术快速演进的一年,多项热点技术开始在商业和消费领域崭露头角,深刻改变了人们的生活和工作方式,这一年,移动互联网的雏形逐渐显现,智能手机开始普及,以iPhone一代为代表的触屏设备重新定义了人机交互;云计算概念从理论走向实践...
电脑连接路由器后显示“未识别网络”是常见的网络问题,通常涉及硬件连接、IP配置、驱动程序或路由器设置等多个方面,以下从问题原因、排查步骤及解决方案进行详细分析,帮助用户快速定位并解决问题,问题原因分析“未识别网络”可能由以下因素导致:1....
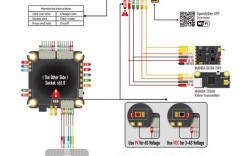
无人机上GPS模块的接线工作是确保无人机能够精准定位、导航和执行任务的关键环节,其接线过程需要严格按照技术规范操作,以确保信号稳定性和系统兼容性,以下是详细的接线步骤、注意事项及常见问题的解答,GPS模块接线前的准备工作在开始接线前,需确认...