小米无人机在飞控系统的选择上,体现了其技术整合与供应链策略的灵活性,根据不同机型定位和技术需求,小米无人机的飞控系统主要分为两类:自主研发的“Mi Fly Control”与行业主流开源飞控的深度定制化方案,这两类方案在不同产品线中各有侧重,共同支撑了无人机从消费级到专业级的稳定飞行与智能拍摄需求。

在消费级无人机领域,如小米无人机3系列等早期机型,飞控系统多基于开源平台进行深度优化,开发团队以PX4(Auterion开发的开源飞控固件)或ArduPilot(开源无人机飞控软件)为基础框架,针对小米无人机的硬件特性进行适配性开发,这一策略的优势在于能够快速利用成熟的开源生态,降低研发周期,同时通过定制化算法提升飞行稳定性,在姿态控制方面,团队优化了卡尔曼滤波算法,结合六轴陀螺仪与气压计、GPS等多传感器数据,实现厘米级悬停精度;在航线规划上,整合了高精度地图与RTK(实时动态差分)定位模块,支持自动返航、兴趣点环绕等智能功能,开源平台还便于后续通过OTA升级迭代功能,如新增飞行模式或优化避障算法。
对于定位更专业的小米无人机4K系列及后续高端机型,小米逐步转向自主研发的“Mi Fly Control”飞控系统,该系统采用模块化设计,核心包括主控单元、传感器融合模块和通信模块三部分,主控单元基于高性能ARM Cortex-M系列处理器,运行实时操作系统(RTOS),确保控制指令的低延迟响应;传感器融合模块集成三轴加速度计、陀螺仪、磁力计、气压计、光流传感器及视觉避障系统,通过自适应滤波算法实现多源数据冗余校验,提升抗干扰能力;通信模块则采用2.4GHz与5.8GHz双频段,结合自研的跳频技术,降低信号丢失风险,在智能飞行功能上,“Mi Fly Control”支持手势控制、跟随拍摄、三维航线规划等高级特性,其核心算法通过深度学习优化,能够精准识别拍摄主体并动态调整飞行轨迹。
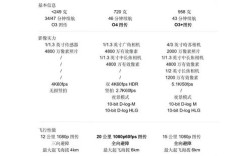
下表对比了小米无人机两类飞控系统的核心特点:
| 特性 | 基于开源平台的定制飞控 | Mi Fly Control自主研发系统 |
|---|---|---|
| 适用机型 | 小米无人机3系列等早期消费级产品 | 小米无人机4K系列及后续高端机型 |
| 核心架构 | PX4/ArduPilot开源框架 | 自研模块化RTOS架构 |
| 处理器 | Cortex-M4级定制芯片 | Cortex-M7高性能处理器 |
| 传感器融合 | 六轴IMU+GPS+气压计基础配置 | 九轴IMU+RTK+光流+视觉避障冗余方案 |
| 智能功能 | 基础自动返航、航线规划 | 手势控制、AI跟随、3D航线规划 |
| 升级方式 | OTA固件升级 | OTA+云端算法协同优化 |
值得一提的是,小米无人机的飞控系统还与自研的Mi Pilot APP深度联动,APP通过低延迟图传系统(支持1080p/60fps实时画面)接收飞控数据,并直观呈现飞行参数、电池状态及卫星信号等信息,APP内置的飞行模拟器允许用户在虚拟环境中熟悉操控逻辑,降低新手操作门槛,在安全机制方面,两类飞控均具备低电量自动返航、失控保护、地理围栏等功能,其中高端机型还增加了双IMU冗余设计,确保单传感器故障时仍能维持稳定飞行。

相关问答FAQs:
Q1:小米无人机的飞控系统是否支持第三方固件刷机?
A:部分基于开源平台的老款机型(如小米无人机3)支持刷入第三方PX4或ArduPilot固件,但需注意刷机可能失去官方保修及OTA更新支持,高端机型采用自研Mi Fly Control系统,暂不支持第三方固件刷机,以保障飞行安全与系统稳定性。
Q2:Mi Fly Control系统的视觉避障技术原理是什么?
A:Mi Fly Control的双目视觉避障系统通过左右摄像头捕捉实时图像,利用立体视觉算法计算障碍物的距离、位置及运动轨迹,结合深度学习模型识别障碍物类型(如树木、建筑物等),再通过飞控单元实时调整飞行速度或航线,实现最大5米范围内的主动避障,在弱光环境下,系统会自动切换至红外辅助补光模式,确保避障功能有效性。