无人机拉高自转是一种结合了垂直爬升与水平旋转的飞行动作,常用于航拍表演或飞行技巧展示,操作时需确保无人机具备足够的动力储备和稳定性,操作者也应具备熟练的飞行控制能力,以下是具体操作步骤及注意事项:

(图片来源网络,侵删)
操作步骤
-
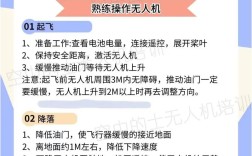
准备工作
- 选择开阔无干扰的飞行环境,避开人群、建筑物和障碍物。
- 检查无人机电池电量(建议不低于80%)、螺旋桨安装牢固度及GPS信号强度。
- 切换至手动模式或运动模式(根据无人机型号),关闭自动悬停功能以确保操控灵活性。
-
初始爬升
- 油门杆缓慢推至约70%-80%,使无人机匀速垂直上升,同时保持机身平稳。
- 注意观察高度数据,��升速度建议控制在0.5-1米/秒,避免因加速度过快导致动力不足。
-
触发旋转
- 当达到目标高度(通常不低于20米,以确保安全距离)后,迅速向左或右打满方向舵(偏航操作)。
- 同时微调副翼(横滚)和升降舵(俯仰),使无人机略微倾斜15-30度,增强旋转离心力。
- 部分无人机支持“航向锁定”功能,建议关闭以避免自动修正旋转角度。
-
维持自转状态
 (图片来源网络,侵删)
(图片来源网络,侵删)- 持续微调方向舵,保持旋转速度均匀(通常为90-180度/秒)。
- 通过升降舵微调高度,抵消因旋转产生的轻微下沉趋势。
- 若出现抖动或偏航,立即减小横滚角度并重新校准姿态。
-
结束动作
- 缓慢回中方向舵,停止旋转。
- 油门杆降至50%,使无人机缓慢悬停或下降,恢复至稳定状态。
注意事项
- 动力要求:无人机需具备较高的TWR(推重比),建议选择多旋翼机型且负载率低于60%。
- 环境因素:避免在强风或磁场干扰区域操作,防止姿态失稳。
- 练习技巧:新手建议先通过模拟器练习,熟练后再实飞,并从低高度、小角度开始尝试。
常见问题与解决方案
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 旋转过程中抖动 | 螺旋桨不平衡或电机负载不均 | 检查螺旋桨是否变形,校准电机 |
| 无法维持高度 | 动力不足或电池电量不足 | 降低旋转速度,更换满电电池 |
相关问答FAQs
Q1:无人机拉高自转时突然倾斜失控怎么办?
A1:立即松开所有摇杆,让无人机进入自稳定模式;若仍倾斜,快速关闭动力开关,避免炸机,事后检查陀螺仪校准及螺旋桨状态。
Q2:如何选择适合自转的无人机型号?
A2:优先选择支持手动模式、动力强劲的航拍无人机(如DJI Mavic 3、Air 3),确保其具备三轴机械增稳和姿态传感器,以提升操控精度与稳定性。

(图片来源网络,侵删)