Spark无人机作为大疆消费级无人机系列中的经典产品,其传感器系统是实现精准飞行、稳定拍摄和智能功能的核心支撑,这套传感器系统融合了多种先进技术,共同为用户提供了安全可靠的飞行体验和高质量的影像创作能力。

Spark无人机的传感器系统主要由视觉导航系统、惯性测量单元(IMU)、气压计、GPS模块以及避障传感器等组成,视觉导航系统是其中的关键部分,包含双目视觉摄像头和底部单目视觉摄像头,双目视觉摄像头位于无人机前部,通过立体视觉原理实现三维环境感知,能够实时构建周围环境的深度信息,用于智能跟随、手势控制等功能的实现,底部单目视觉摄像头则主要用于精准悬停和近地面视觉定位,在GPS信号较弱或室内环境下,通过识别地面纹理和特征点,保持无人机的稳定悬停,该视觉系统还支持地形跟随功能,使无人机能够在飞行过程中自动保持与地面的相对高度,适应复杂地形。
惯性测量单元(IMU)是Spark无人机的“平衡器官”,由三轴陀螺仪和三轴加速度计组成,陀螺仪负责测量无人机在三个轴向的角速度,即旋转运动的快慢和方向;加速度计则用于测量无人机在三个轴向的线性加速度,从而确定无人机的姿态和运动状态,IMU以高频(通常为1000Hz)采集数据,为飞行控制系统提供实时的姿态反馈,确保无人机在空中能够快速响应操控指令,保持稳定飞行,为了提高IMU的精度,Spark还配备了电子罗盘(磁力计),用于确定无人机的朝向,避免航向偏差。
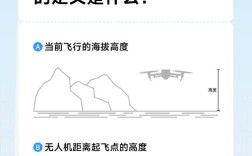
气压计是高度测量传感器,通过测量大气压力来计算无人机的海拔高度,与GPS提供的绝对高度不同,气压计测量的是相对高度,能够在GPS信号丢失或精度不足时(如室内、桥下等环境)提供高度参考,Spark的气压计具有较高的灵敏度,能够感知微小的高度变化,确保在不同环境下悬停高度的稳定性。
GPS模块(包括GPS和GLONASS双模定位)为无人机提供室外精准定位和导航服务,该模块能够接收多颗卫星信号,通过三角定位原理确定无人机的经纬度坐标和海拔高度,实现精准悬停、自动返航、航线飞行等功能,在GPS信号良好的环境下,Spark的定位精度可达米级,并且支持GPS增强模式(如DJI的GP系列),进一步提升定位精度和抗干扰能力。

避障传感器是Spark无人机安全飞行的重要保障,主要由前部视觉传感器和底部红外传感器组成,前部视觉传感器利用双目视觉技术,能够探测前方一定距离(通常为5-15米)内的障碍物,并在智能跟随模式下自动规避障碍物,底部红外传感器则用于探测下方近距离的障碍物,尤其是在低空飞行或降落时,能够实时监测地面高度,防止碰撞,Spark还配备了视觉下视传感器,与红外传感器协同工作,确保在复杂地面环境下(如水面、玻璃等)也能准确感知高度和障碍物。
这些传感器并非独立工作,而是通过飞控系统进行数据融合处理,飞控系统采用卡尔曼滤波等算法,综合各传感器的数据,剔除噪声和误差,输出精确的姿态、位置和速度信息,实现对无人机的实时控制,在悬停状态下,飞控系统会融合GPS、气压计、视觉和IMU的数据,确保无人机在三个轴向上的稳定;在飞行过程中,避障传感器与飞控系统的协同工作,能够实时调整飞行路径,规避障碍物。
以下表格总结了Spark无人机主要传感器的功能及参数:
| 传感器类型 | 功能描述 | 主要参数/特点 |
|---|---|---|
| 双目视觉摄像头 | 前方环境感知、深度信息构建、智能跟随、手势控制、避障(前方) | 探测距离:5-15米;支持3D环境建模 |
| 底部单目视觉摄像头 | 精准悬停、近地面视觉定位、地形跟随、避障(下方) | 支持多种地面纹理识别;低空悬停稳定性高 |
| IMU(陀螺仪+加速度计) | 测量姿态角速度和线性加速度,提供实时运动状态反馈 | 采样频率:1000Hz;三轴设计,高精度 |
| 电子罗盘(磁力计) | 确定无人机朝向,辅助航向控制 | 校准功能;抗干扰设计 |
| 气压计 | 测量相对高度,辅助悬停和高度控制 | 灵敏度高;适应不同气压环境 |
| GPS/GLONASS模块 | 室外精准定位、导航、自动返航、航线飞行 | 双模定位;精度:米级;支持GPS增强 |
| 红外避障传感器 | 探测下方近距离障碍物,辅助低空飞行和降落 | 探测范围:0-5米;适应多种地面材质 |
通过这套完善的传感器系统,Spark无人机能够在多种环境下实现安全稳定的飞行,同时为用户提供丰富的智能拍摄功能,无论是初学者还是资深玩家,都能借助这些传感器轻松上手,创作出精彩的航拍作品。

相关问答FAQs:
Q1:Spark无人机在室内飞行时主要依靠哪些传感器进行定位和悬停?
A1:在室内或GPS信号弱的环境下,Spark无人机主要依靠底部单目视觉摄像头和红外避障传感器进行定位和悬停,底部视觉摄像头通过识别地面纹理和特征点,实现视觉定位;红外传感器则辅助监测下方高度和障碍物,确保在无GPS信号时的飞行稳定性,IMU和气压计也会提供姿态和高度参考,共同维持悬停精度。
Q2:Spark无人机的避障系统在什么情况下可能会失效?
A2:Spark的避障系统主要依赖视觉和红外传感器,可能在以下情况下性能受限:1)极端环境(如强光直射、黑暗或低对比度场景),导致视觉传感器无法有效识别障碍物;2)复杂纹理或透明材质(如玻璃、水面)的障碍物,可能影响视觉传感器的深度感知;3)高速飞行或快速转向时,避障系统的响应可能滞后;4)传感器被灰尘、水滴等污染物遮挡时,需及时清洁以确保正常工作。