机器人主要利用的技术涵盖了多个领域,这些技术相互融合、协同工作,赋予机器人感知、决策、执行和环境交互的能力,核心技术包括人工智能、传感器技术、驱动与控制技术、人机交互技术以及大数据与云计算技术等。

人工智能是机器人的“大脑”,赋予其智能化的决策和学习能力,机器学习算法(如深度学习、强化学习)使机器人能够通过数据训练识别模式、优化行为,例如工业机器人通过视觉识别定位零件,服务机器人理解语音指令,自然语言处理技术让机器人能够与人类进行语言交流,情感计算则帮助机器人识别人类情绪并作出适当回应,在决策层面,路径规划算法(如A*算法、Dijkstra算法)使机器人能够在复杂环境中自主规划最优移动路线,而决策树、模糊逻辑等方法则用于处理多变量问题,如医疗机器人根据患者数据制定手术方案。
传感器技术是机器人的“感知器官”,为其提供与物理世界交互的信息,常见的传感器包括视觉传感器(摄像头、激光雷达)、触觉传感器(压力传感器、扭矩传感器)、距离传感器(超声波、红外传感器)等,激光雷达通过发射激光束并测量反射时间,构建周围环境的3D点云地图,广泛应用于自动驾驶机器人和移动机器人;视觉传感器结合图像识别算法,可识别物体、人脸和场景,实现导航、避障和目标追踪;触觉传感器则让机器人在抓取物体时感知力度、形状和纹理,避免损坏物体或抓取失败,多传感器融合技术(如卡尔曼滤波、深度学习融合)通过整合不同传感器的数据,提高感知的准确性和鲁棒性,弥补单一传感器的局限性。
驱动与控制技术是机器人的“骨骼和肌肉”,实现精确的运动执行,驱动系统包括电机(伺服电机、步进电机)、液压驱动和气动驱动,其中伺服电机因其高精度、高响应速度被广泛应用于工业机器人关节控制,控制技术涉及运动控制算法(如PID控制、自适应控制)和动力学建模,确保机器人按照预设轨迹完成动作,工业机器人的重复定位精度可达±0.02mm,得益于高精度编码器和闭环控制系统;协作机器人通过力矩传感器控制关节输出力,实现与人类安全共处。
人机交互技术使机器人能够与人类自然协作,语音识别和合成技术让机器人通过语音指令接收任务并反馈结果;手势识别和动作捕捉技术允许用户通过肢体动作控制机器人;虚拟现实(VR)和增强现实(AR)则用于远程操作和机器人培训,如外科医生通过AR导航系统控制手术机器人,触觉反馈技术让操作者远程感知机器人与环境的交互力,提升操作的精准性。

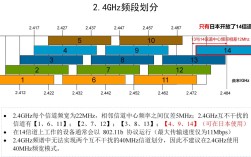
大数据与云计算技术为机器人提供强大的后台支持,机器人通过5G或Wi-Fi将收集的环境数据、运行状态上传至云端,利用云计算平台进行大规模数据存储和分析,优化算法模型,边缘计算则将部分计算任务下放到机器人本地,减少延迟,满足实时性要求高的场景(如自动驾驶避障)。
相关问答FAQs:
-
问:机器人是否需要所有技术才能工作?
答:不需要,机器人根据应用场景选择核心技术,例如工业机器人主要依赖驱动控制、传感器和人工智能,而扫地机器人则更侧重传感器、路径规划和运动控制,不同技术组合可满足特定需求。 -
问:人工智能在机器人中的局限性是什么?
答:当前人工智能依赖大量数据训练,在复杂动态环境中泛化能力有限;机器人的“常识”推理和自主决策能力仍较弱,难以应对突发情况,需结合规则编程或人工干预。 (图片来源网络,侵删)
(图片来源网络,侵删)